Reallabor für rechtskonforme KI und Robotik
Reallabor für rechtskonforme KI und RobotikUse Case Beschreibung
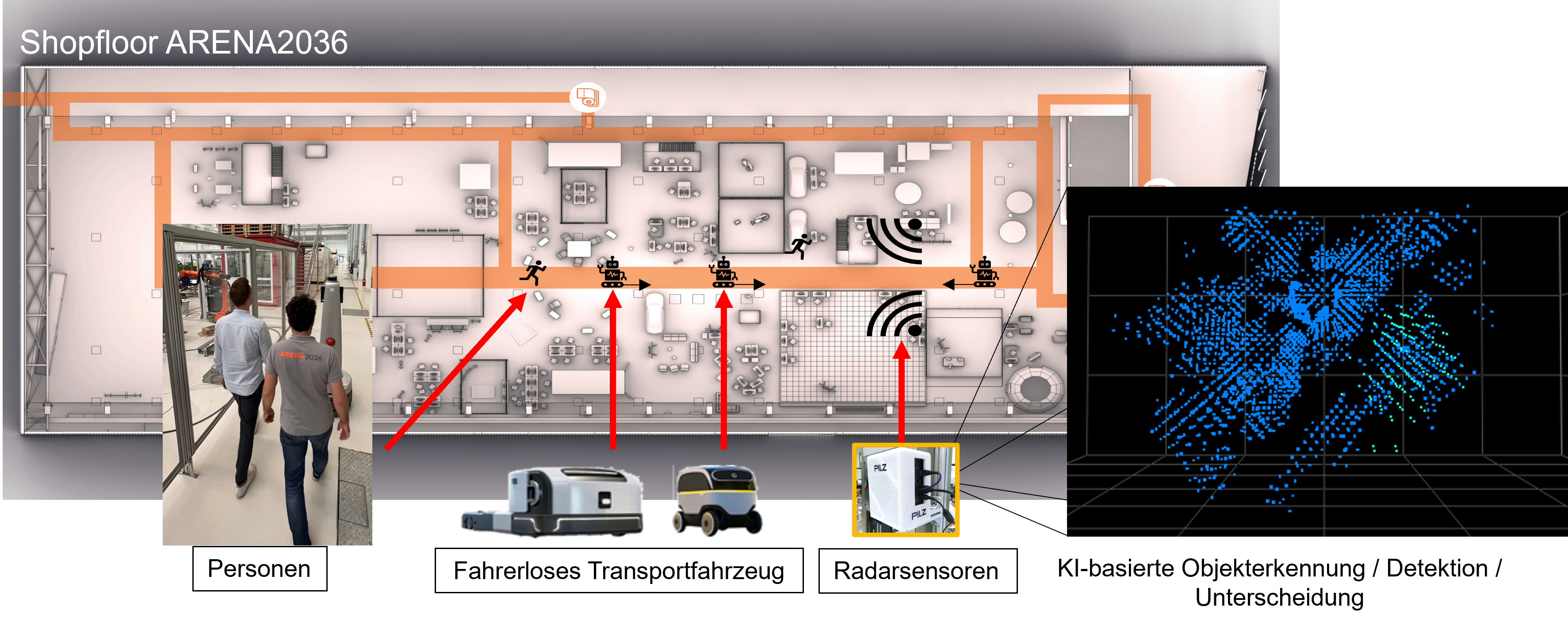
Bei kollaborativen Roboteranwendungen werden Roboter oftmals verlangsamt oder gestoppt, wenn ein Mensch den Arbeitsraum betritt. Da in der konventionellen Sicherheitstechnik nicht unterschieden werden kann, welche Art von Objekt sich im Arbeitsraum des Roboters aufhält, muss ein Roboter auch dann gestoppt werden, wenn autonomes Fahrzeug (AGV) sich nähert.
In diesem Anwendungsfall wird ein Radarsensor in einer Fabrik eingesetzt, um die Arbeitsgeschwindigkeit eines Cobots zu steuern. Ein KI-System analysiert die Radardaten, um zu erkennen, ob sich ein Mensch oder ein autonomes Fahrzeug (AGV) nähert. Erkennt die KI einen Menschen, wird die Geschwindigkeit des Cobots reduziert oder er wird gestoppt. Bei der Erkennung eines AGVs wird die normale Geschwindigkeit beibehalten. Die KI analysiert kontinuierlich die Umgebung und trifft eigenständig Entscheidungen über die Bewegungen des Cobots.